Welcome back! In the first post of this series, we’ve defined the density matrix and in the second one, we saw how to use it to extract expectation values. In this post, we will see how the density matrix evolves in time. We will first derive the Liouville-Von Neumann equation, which is the density matrix equivalent to the time-dependent Schrödinger equation, and show how it can be used to find analytical solutions for the evolution of spin systems. We will then search for the solution to the Liouville-Von Neumann equation in terms of the time propagator. Finally, we will use this solution and numerical simulation to describe the evolution of a simple spin system both with time-independent and time-dependent Hamiltonians. The MATLAB scripts can be downloaded from here. The Python scripts can be accessed and ran from here.
We already know how the ket describing a system evolves in time (see this post). That’s defined by the time-dependent Schrödinger equation
(1) 
where  is the Hamiltonian acting on the system at time
is the Hamiltonian acting on the system at time  , expressed in units of angular frequency (that is, setting
, expressed in units of angular frequency (that is, setting  ). The evolution of the density matrix is obtained by plugging Eq. 1 into the definition of the density matrix
). The evolution of the density matrix is obtained by plugging Eq. 1 into the definition of the density matrix  ,
,
(2) ![\begin{equation*}\frac{d}{dt}\hat{\rho}(t)=-i[\hat{H}(t),\hat{\rho}(t)],\end{equation*}](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-2bf925bd5ebde51ee2cbd28801575e82_l3.png "Rendered by QuickLaTeX.com")
where ![[\hat{A},\hat{B}] = \hat{A}\hat{B}-\hat{B}\hat{A}](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-0098716a4940f93286f0e38e6a9f4ab6_l3.png "Rendered by QuickLaTeX.com") is the commutator of operators
is the commutator of operators  and
and  (the commutation relations of the angular momentum operators are given below). Eq. 2 is called the Liouville-Von Neumann (LvN) equation.
(the commutation relations of the angular momentum operators are given below). Eq. 2 is called the Liouville-Von Neumann (LvN) equation.
The LvN equation gives us insight into the evolution of quantum mechanical systems. Indeed, it shows that the density matrix (and hence, the system) will only evolve if there exist terms in the Hamiltonian that do not commute with the density operator.
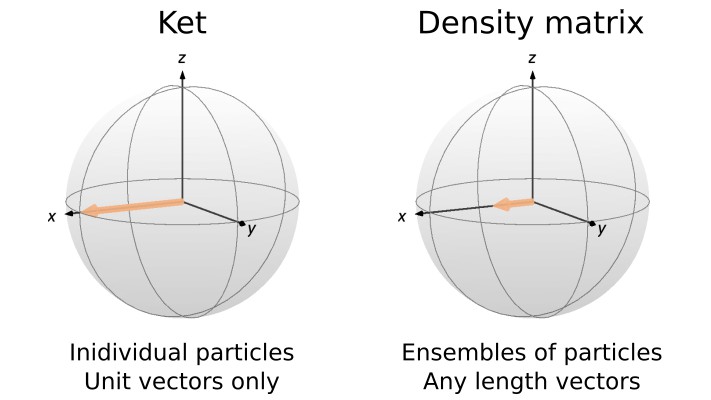
For example, if a spin is aligned with a magnetic field  (that we choose to be along
(that we choose to be along  ), the density matrix and the Hamiltonian can be expressed as
), the density matrix and the Hamiltonian can be expressed as  and
and  , respectively, where
, respectively, where  is the Larmor frequency of the spin. Because
is the Larmor frequency of the spin. Because ![[\hat{H},\hat{\rho}]=\omega_0[\hat{I}_z,\hat{I}_z]=0](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-74c55cc653dcbcb78d76b3a562aa88c2_l3.png "Rendered by QuickLaTeX.com") , the LvN equation tells us that system will not evolve (that is, it will remain in the state ). To the contrary, if the system is a spin aligned perpendicular to , say along the
, the LvN equation tells us that system will not evolve (that is, it will remain in the state ). To the contrary, if the system is a spin aligned perpendicular to , say along the  axis, then we can write
axis, then we can write  . In this case, the commutator of the Hamiltonian and the density matrix is non zero
. In this case, the commutator of the Hamiltonian and the density matrix is non zero ![[\hat{H},\hat{\rho}]=\omega_0[\hat{I}_z,\hat{I}_x]=i\omega_0\hat{I}_y](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-fd419a58d1c2809c8e3697367dabba73_l3.png "Rendered by QuickLaTeX.com") . According to Eq. 2,
. According to Eq. 2,  takes
takes  into
into  .
.
This discussion leads us to the important conclusion that all the conditions below are equivalent
![[\hat{H},\hat{\rho}]=0](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-88a3dbd45ac9e4b033d14d4d6891c25d_l3.png "Rendered by QuickLaTeX.com")
 and
and  have identical eigenbases
have identical eigenbases is an eigenstate of and are stationary
is an eigenstate of and are stationarywhile all the following are equivalent
![[\hat{H},\hat{\rho}]\ne 0](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-f1a479acdd51bae3ad3f6ac550a70997_l3.png "Rendered by QuickLaTeX.com") and have distinct eigenbases is not an eigenstate of and are not stationary
and have distinct eigenbases is not an eigenstate of and are not stationaryA situation that we will often encounter is that operators “turn into one another” in a closed loop. This is the case for the three angular momentum operators which satisfy the commutation relations,
(3) ![\begin{equation*}\begin{split} [\hat{I}_x,\hat{I}_y] & = i\hat{I}_z \\ [\hat{I}_y,\hat{I}_z] & = i\hat{I}_x \\ [\hat{I}_z,\hat{I}_x] & = i\hat{I}_y,\end{split} \end{equation*}](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-018a921d3ae01c6fb4d8666cb319def5_l3.png "Rendered by QuickLaTeX.com")
which can be summarized as
(4) ![\begin{equation*}[\hat{I}_x,\hat{I}_y] = i\hat{I}_z \circlearrowleft .\end{equation*}](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-479e0750c430407560e65185ea608c49_l3.png "Rendered by QuickLaTeX.com")
This set of commutation relations is called cyclic commutation because the three operators and their commutators form a closed loop. Together, the LvN equation and the cyclic commutation of the angular momentum operators tell us that turns into , turns into , and turns into .
One might recognize that this corresponds to a set of differential equations defining rotations. For example, for a spin along the axis at time  (i.e.,
(i.e.,  ), a magnetic field along the axis () will rotate the spin about the axis, yielding the solution
), a magnetic field along the axis () will rotate the spin about the axis, yielding the solution
(5) 
that we sometimes like to write as
(6) 
which means that acts on  for a time . It can easily be verified that Eq. 5 is a solution to the LvN equation with initial condition .
for a time . It can easily be verified that Eq. 5 is a solution to the LvN equation with initial condition .
Using Eq. XXX from the previous post (link XXX), we find that the expectation values of the angular momentum operators along the Cartesian coordinates are
(7) 
We obtained this result using the ket formalism in this post. Here, we have found that the same result is obtained using the density matrix formalism, but perhaps in an easier way, which requires less calculations (and don’t we love that?).
We have shown how the cyclic commutation relations help us track the evolution of the three Cartesian angular momentum operators in time. But it’s in fact much more general. Indeed, for any set of three operators , , and  fulfilling the cycling commutation relation
fulfilling the cycling commutation relation
(8) ![\begin{equation*}[\hat{A},\hat{B}] = i\hat{C} \circlearrowleft ,\end{equation*}](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-ed945ed172335fce408aaf32a4fda298_l3.png "Rendered by QuickLaTeX.com")
we have that
(9) 
and, because ![[\hat{A},\hat{B}]=-[\hat{B},\hat{A}]](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-53da6231b0133f9a2eaea84705f8150b_l3.png "Rendered by QuickLaTeX.com") ,
,
(10) 
So far, we have seen one example of cyclic commutation relation, that of the Cartesian angular momentum operator of a single spin. In future posts, we will see that coupled spins have multiple spin operators (e.g.  ) with their own cyclic commutation relations. The results we have just obtained (Eqs. 9 and 10) will be at the core of how we will track analytically the evolution of quantum mechanical systems in time.
) with their own cyclic commutation relations. The results we have just obtained (Eqs. 9 and 10) will be at the core of how we will track analytically the evolution of quantum mechanical systems in time.
Cyclic commutations is one way to use the LvN equation. Another way to use it is by solving it. That’s what we do in this section. As we have shown (see this post), for a time-independent Hamiltonian, the time-dependent Schrödinger equation has a convenient solution
(11) 
expressed in terms of the propagator
(12) 
where it is assumed, again, that the Hamiltonian is expressed in rad.s-1, and not in Joules. This equation has an equivalent in terms of the density matrix,
(13) 
Note that the propagator is a unitary operator, and so  . It is common to find
. It is common to find  in the expression above.
in the expression above.
It is important to note that Eq. 13 is exact whatever the length of provided the Hamiltonian is time independent. If the Hamiltonian is piece-wise time independent, we can apply Eq. 13 piece by piece. This is typical of pulse sequences, where the Hamiltonian is constant during each individual pulse. Let’s say that  acts during
acts during  , then
, then  acts during
acts during  , and so on. The density matrix after the
, and so on. The density matrix after the  th piece is
th piece is
(14) 
where
(15) 
Eq. 13 will prove to be useful in the context of numerical simulations (see for example this post). Let’s say we want to track how the system evolves under a time-independent Hamiltonian over a time period . We can chop into  intervals of length
intervals of length  . Then, setting
. Then, setting  and
and  , we can recursively compute the state of the system along time using
, we can recursively compute the state of the system along time using
(16) 
with the propagator
(17) 
which is the same for all time steps.
When the Hamiltonian is time dependent, Eq. 16 can still be used iteratively for a short time period during which the Hamiltonian can be considered locally time independent, but the propagator needs to be recalculated for each time step.
(18) 
What is short enough for  depends on how rapidly the Hamiltonian changes with time, as we will discuss below.
depends on how rapidly the Hamiltonian changes with time, as we will discuss below.
In the previous section we mentioned that the solution to the LvN equation was convenient for numerical simulation. In this section, we will use it to see how a spin perpendicular to a static magnetic field evolves in time, which we derived analytically above (see Eq. 7). It’s the exact same simulation as in this post, except that we move from the ket formalism to the density matrix formalism. We’ll make use of the function I to compute angular momentum operators (see this post for details).
The code snippet below defines the following
and an empty matrix  in which the results of the numerical simulation will be stored (one row per Cartesian angular momentum operator and one column per time point)..
in which the results of the numerical simulation will be stored (one row per Cartesian angular momentum operator and one column per time point)..omega0 = 2*pi*1; % Larmor freq (rad.s-1)
dt = 0.01; % Time increments (s)
K = 300; % Number of increments (-)
S = 1/2; % Spin system - single spin 1/2
% Time axis and empty vectors to store results
% of numerical propatation
t = dt*(0:K-1);
It = zeros(3,K);
% Initial state
rho0 = I(S,'x');
% Hamiltonian and propagator during dt
H0 = omega0*I(S,'z');
U0 = expm(-1i*H0*dt);
% Observables
O{1} = I(S,'x');
O{2} = I(S,'y');
O{3} = I(S,'z');# Packages importation
import numpy as np
import matplotlib.pyplot as plt
from scipy.linalg import expm
!pip install IOperator
from IOperator import I
omega0 = 2*np.pi*1 # Larmor freq (rad.s-1)
dt = 0.01 # Time increments (s)
K = 300 # Number of increments (-)
S = [1/2] # Spin system - single spin 1/2
# Time axis and empty vectors to store results of numerical propagation
t = dt * np.arange(K)
It = np.zeros((3, K))
# Initial state
rho0 = I(S,'x')
# Hamiltonian and propagator during dt
H0 = omega0*I(S,'z')
U0 = expm(-1j*H0*dt)
# Observables
O = [I(S,'x'), I(S,'y'), I(S,'z')]The core of the computation happens now. We start by initializing the state of the system by setting the variable describing the system over time  to the system at time 0. Then, at each iteration of the for loop, we compute the expectation value of the angular momentum along the Cartesian coordinates (using the formula derived in the previous post link XXX), and store them in the vector we created in the first code block. After that, we “move the system” by a time increment , using Eq. 16.
to the system at time 0. Then, at each iteration of the for loop, we compute the expectation value of the angular momentum along the Cartesian coordinates (using the formula derived in the previous post link XXX), and store them in the vector we created in the first code block. After that, we “move the system” by a time increment , using Eq. 16.
Note that expectation values are supposed to be real. However, due to the finite precision of numerical calculations, a tiny imaginary component might remain. We discard this small imaginary part by taking the real part of the expectation value before storing it in the matrix.
% Initialization of the system state
rho = rho0;
% Loop for propagation
for k = 1:K
% Expectation values at time (k-1)*dt
for i = 1:length(O)
It(i,k) = real(trace(O{i}*rho));
end
% Propagation during dt
rho = U0*rho*U0';
end# Initialization of the system state
rho = rho0
# Loop for propagation
for k in range(K):
for i in range(3):
# Expectation values at time (k-1)*dt
It[i,k] = np.real(np.trace(O[i]@rho))
# Propagate during dt
rho = U0@rho@U0.T.conj()Finally, we compute the analytical solution we obtained in Eq. 7, and plot them together with the results of the numerical calculations. The resulting plot is shown below. The results obtained by analytical and numerical calculations are shown as black dashed and solid colored lines, respectively. They are the exact same we obtained using the ket formalism in this post.
% Analytical solution
Ita = [cos(omega0*t)/2; sin(omega0*t)/2; zeros(1,K)];
% Plot of the results
figure(1), lw = 1.5;
plot(t,It,'LineWidth',lw), hold on
plot(t,Ita,'k--','LineWidth',lw), hold off
yline([+1 -1]/2)
legend({'{\itI_x}','{\itI_y}','{\itI_z}'})
xlabel('Time (s)'), ylabel('<{\itI_\mu}> (-)')
yticks((-1:+1)/2), yticklabels({'-1/2','0','+1/2'})
set(gca,'FontSize',12)# Analytical solution
Ita = np.array([np.cos(omega0 * t) / 2, np.sin(omega0 * t) / 2, np.zeros(K)])
# Plot of the results
plt.figure(1)
lw = 1.5
plt.plot(t, It.T, linewidth=lw)
plt.plot(t, Ita.T, 'k--', linewidth=lw)
plt.axhline(y=1/2, color='gray', linestyle='--')
plt.axhline(y=-1/2, color='gray', linestyle='--')
plt.legend(['I_x', 'I_y', 'I_z'])
plt.xlabel('Time (s)')
plt.ylabel('<I_μ> (-)')
plt.yticks(np.arange(-1, 2, 1) / 2, ['-1/2', '0', '+1/2'])
plt.gca().tick_params(labelsize=12)
plt.show()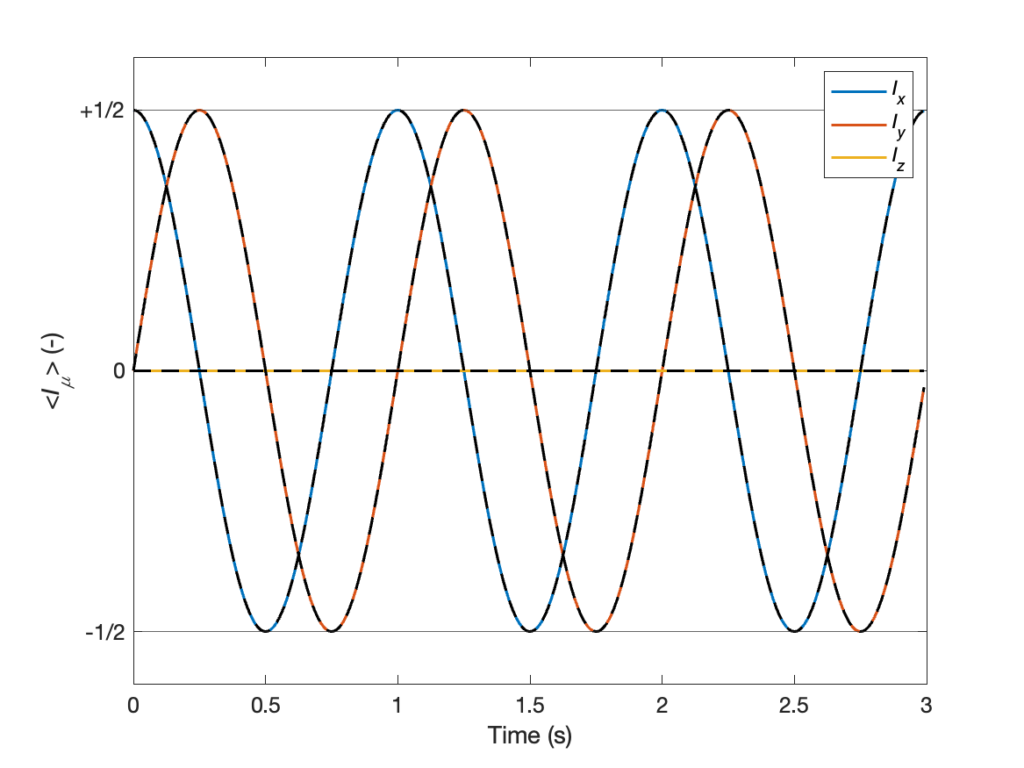
Lastly, we want to look at an important case: the evolution of systems with time-dependent Hamiltonians. In particular, we are interested in the situation where the Hamiltonian is not piece-wise time constant, but rather constantly evolving in time. As an example, we will simulate the evolution of a spin whose Larmor frequency evolves linearly in time from  at time 0 to
at time 0 to  at time
at time  ,
,
(19) 
This example is chosen because it is easy to treat, but it might not be particularly relevant in practice!
There are only a few differences in the script compared to the time-independent case. First, we need to define and in the beginning of the script. We will also define the time increments slightly differently for convenience. Instead of defining and  , we define and and calculate
, we define and and calculate  . More importantly, we cannot compute the Hamiltonian and the propagator in the beginning of the script, as it will change for each iteration . This must therefore be done within the for loop (see the next code snippet).
. More importantly, we cannot compute the Hamiltonian and the propagator in the beginning of the script, as it will change for each iteration . This must therefore be done within the for loop (see the next code snippet).
omega0_i= 2*pi*0; % Larmor freq at the beginning (rad.s-1)
omega0_f= 2*pi*6; % Larmor freq in the end (rad.s-1)
tmax = 3; % Maximum time (s)
K = 300; % Number of increments (-)
S = 1/2; % Spin system - single spin 1/2
% Time axis and empty vectors to store results
% of numerical propatation
dt = tmax/K;
t = dt*(0:K-1);
It = zeros(3,K);
% Initial state
rho0 = I(S,'x');
% Observables
O{1} = I(S,'x');
O{2} = I(S,'y');
O{3} = I(S,'z');omega0_i= 2*np.pi*0 # Larmor freq at the beginning (rad.s-1)
omega0_f= 2*np.pi*6 # Larmor freq in the end (rad.s-1)
tmax = 3 # Maximum time (s)
K = 300 # Number of increments (-)
S = [1/2] # Spin system - single spin 1/2
# Time axis and empty vectors to store results of numerical propagation
dt = tmax/K;
t = dt * np.arange(K)
It = np.zeros((3, K))
# Initial state
rho0 = I(S,'x')
# Hamiltonian and propagator during dt
H0 = omega0*I(S,'z')
U0 = expm(-1j*H0*dt)
# Observables
O = [I(S,'x'), I(S,'y'), I(S,'z')]Here is the key difference compared to the time-independent case. In the propagation loop, we compute the expectation values, but we need to compute the propagator before we can move the density matrix in time by . We first compute the Larmor frequency at time  using Eq. 19. Then, we calculate the Hamiltonian for this Larmor frequency and the corresponding propagator using Eq. 18. It’s not something that we usually like to do as computing the propagator can be very time consuming. For large spin systems, it can sometimes even take more than the propagation loop itself (it requires diagonalizing the Hamiltonian, which is computationally expensive for large matrices). So we only calculate the propagator at each step if we really need to.
using Eq. 19. Then, we calculate the Hamiltonian for this Larmor frequency and the corresponding propagator using Eq. 18. It’s not something that we usually like to do as computing the propagator can be very time consuming. For large spin systems, it can sometimes even take more than the propagation loop itself (it requires diagonalizing the Hamiltonian, which is computationally expensive for large matrices). So we only calculate the propagator at each step if we really need to.
% Initialization of the system state
rho = rho0;
% Loop for propagation
for k = 1:K
% Expectation values at time (k-1)*dt
for i = 1:length(O)
It(i,k) = real(trace(O{i}*rho));
end
% Hamiltonian and propagator during dt
omega0 = omega0_i + (omega0_f-omega0_i)*t(k)/max(t);
H0 = omega0*I(S,'z');
U0 = expm(-1i*H0*dt);
% Propagation during dt
rho = U0*rho*U0';
end# Initialization of the system state
rho = rho0
# Loop for propagation
for k in range(K):
for i in range(3):
# Expectation values at time (k-1)*dt
It[i,k] = np.real(np.trace(O[i]@rho))
# Hamiltonian and propagator during dt
omega0 = omega0_i + (omega0_f - omega0_i) * t[k]/np.max(t);
H0 = omega0 * I(S,'z');
U0 = expm(-1j*H0*dt);
# Propagate during dt
rho = U0@rho@U0.T.conj()Finally, we plot the results. In this case, we don’t compare it with an analytical solution. For this simple single-spin case, an analytical solution can be found. This would require integrating the trajectory of the spins over time using the LvN equation (at least that’s how I would go about it). This is a much harder task than what we did to obtain the result of Eq. 7, which shows the usefulness of numerical simulations.
The resulting plot is shown below. It features an oscillation whose frequency increases with time, as expected from Eq. 19.
% Plot of the results
figure(1), lw = 1.5;
plot(t,It,'LineWidth',lw)
yline([+1 -1]/2), ylim([-1 1]*0.6)
legend(['I_x', 'I_y', 'I_z'])
xlabel('Time (s)'), ylabel('<{\itI_\mu}> (-)')
yticks((-1:+1)/2), yticklabels({'-1/2','0','+1/2'})
set(gca,'FontSize',12)# Plot of the results
plt.figure(1)
lw = 1.5
plt.plot(t, It.T, linewidth=lw)
plt.axhline(y=1/2, color='gray', linestyle='--')
plt.axhline(y=-1/2, color='gray', linestyle='--')
plt.legend(['I_x', 'I_y', 'I_z'])
plt.xlabel('Time (s)')
plt.ylabel('<I_μ> (-)')
plt.yticks(np.arange(-1, 2, 1) / 2, ['-1/2', '0', '+1/2'])
plt.gca().tick_params(labelsize=12)
plt.show()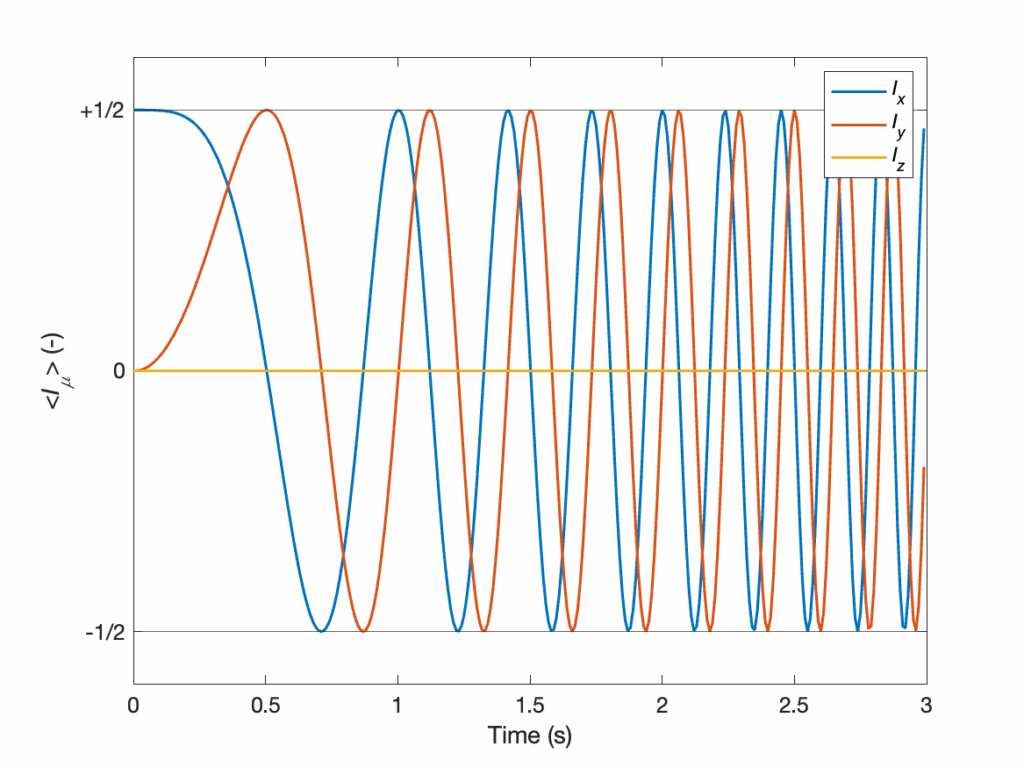
In this post, we have seen how the density matrix evolves in time with different methods, either using cyclic commutation relations or using the solution to the Liouville-Von Neuman equation. In the next posts, we’ll explore how the density matrix can be computed for coupled spins and for large spin ensembles. Stay tuned!
 . We also drop the bar representing the average over the sample in the definition of the density matrix.
. We also drop the bar representing the average over the sample in the definition of the density matrix.![\begin{equation*}\begin{split} \frac{d}{dt}\hat{\rho}&=\frac{d}{dt}\left(\ket{\psi}\bra{\psi}\right) \\&=\frac{d}{dt}\left(\ket{\psi}\right) \bra{\psi} + \ket{\psi}\frac{d}{dt}\left(\bra{\psi}\right) \\&=-i\hat{H}\ket{\psi} \bra{\psi} + i\ket{\psi}\bra{\psi}\hat{H} \\&=-i \left(\hat{H}\ket{\psi} \bra{\psi} - \ket{\psi}\bra{\psi}\hat{H}\right) \\&=-i \left(\hat{H}\hat{\rho} - \hat{\rho}\hat{H}\right) \\&=-i[\hat{H},\hat{\rho}],\label{EvolutionOfRho}\end{split} \end{equation*}](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-67dbf7c0d8f16cafe38e3ad4a43c7065_l3.png "Rendered by QuickLaTeX.com")

 because the Hamiltonian is Hermitian by definition.
because the Hamiltonian is Hermitian by definition.
![\begin{equation*}\begin{split} -i[\omega_0 \hat{I}_z,\hat{\rho}(t)]&=-i\omega_0 \left(\cos(\omega_0 t)[\hat{I}_z,\hat{I}_x] +\sin(\omega_0 t)[\hat{I}_z,\hat{I}_y] \right)\\&=-i\omega_0 \left(\cos(\omega_0 t)i\hat{I}_y +\sin(\omega_0 t)\left(-i\hat{I}_x\right)\right)\\&=\omega_0 \left(\cos(\omega_0 t)\hat{I}_y -\sin(\omega_0 t)\hat{I}_x\right).\end{split} \end{equation*}](https://quantum-resonance.org/wp-content/ql-cache/quicklatex.com-441fc51fd5b74e145f7bf5773e6101b7_l3.png "Rendered by QuickLaTeX.com")
 .
.





 can be the Frobenius norm, although it doesn’t matter much which definition of the matrix norm is used. Where does this criterion come from?
can be the Frobenius norm, although it doesn’t matter much which definition of the matrix norm is used. Where does this criterion come from?  defines the angle by which the system will be rotated under the effect of
defines the angle by which the system will be rotated under the effect of  during
during  is small. In other words,
is small. In other words,  .
.